Ja fa dies que tenia ganes de muntar un kit. Fer els teus propis dissenys i projectes està molt bé, però per això fa falta molt de temps, que és una cosa que no tinc. Entre les proves, els errors, els canvis, i el software, acaben passant moltes hores fins que no tens un aparell funciona. I aquesta vegada no em volia complicar, volia quelcom senzill, sense maldecaps. No hi ha res com una estona de soldador per relaxar-se!
Vaig estar buscant algun kit que m’atraiés, que no fos massa car i que una vegada muntat tingués la seva utilitat. Per fi, a la web de ICStation, en vaig veure un que em va cridar l’atenció. Barat, sense components SMD, i útil: perfecte.

Clica aquí per anar a la pàgina del producte
És una placa amb un regulador per fer una font d’alimentació. Sí, ja ho sé, no és gens ni mica original, i potser massa simple o bàsic. Qui no ha fet això mateix amb un LM317 o un dels mítics 78XX? En aquest cas, però, hi havia un paràmetre que em cridava poderosament l’atenció: 7 Ampers!
Aquesta immensa capacitat de produïr corrent deixa molt enrere la meva venerable (ja ha fet 20 anys) font d’alimentació de taller basada en un LM317, que pot arribar a donar com a molt 1,5A en condicions òptimes. Per suposat que en tot aquest temps que fa que la tinc m’he trobat alguna vegada que he necessitat més corrent. I naturalment sempre va bé tenir una segona font al taller, de vegades fa falta alimentar un circuit (o dos circuits alhora) a tensions diferents.
O sigui que m’hi vaig llençar de cap. Total no era el que costava, i passaria una bona estona soldant, que era simplement el que pretenia. Vaig fer la comanda; aquest és sempre un procés senzill a la majoria de llocs, i aquest no va ser una excepció. Al final vaig pagar amb PayPal, també fàcil i ràpid. El preu, com ja heu vist, és força ajustat, tot i que en aquesta web hi ha constantment ofertes de tota mena (jo en vaig pagar bastant menys, crec recordar). A més, com ja heu vist, el transport fins a la porta de casa està inclòs al preu, tot són comoditats. Vaig aprofitar per demanar una altra cosa que em feia gràcia (i que possiblement sigui objecte d’un altre post en un futur), i a partir d’aquí a esperar.
Mentre no arribava el carter amb la bona notícia, tenia temps de sobra per pensar què en faria del kit, una vegada muntat. Una ullada a les característiques i components em faria agafar una idea general del que tindria entre mans. Anem a veure què hi posa, a la pàgina.
Description -> Descripció
Board size: 74mmx46mm -> En realitat fa 80x48mm, però no importa, és menys que una targeta de crèdit
DC input: 2.5V-38V -> D’acord, però millor l’alimento en alterna
AC input: 2.5V-27V -> Un bon marge, començo a buscar transformador…
DC output: 2.5V-35V -> Un marge molt raonable. En funció del transformador que hi posi, podré arribar molt més amunt que la meva pobra font, que arriba molt justa a 13V.
Maximum current: 7A -> Aquest número brilla amb llum pròpia, admeto que em va enlluernar. Amb aquesta corrent pots alimentar (i cremar!) quasi qualsevol cosa.
Input and output minimum differential pressure: 2.5V -> O sigui que podré pujar fins als 35V si li dono els 27V AC. Em sembla que mai m’han fet falta més de 24V però qui sap…
Listing -> Llista de components
KF301-2P x2 -> Els blocs de connexió per ficar-hi els cables.
10A10 rectifier diode x4 -> Això és un diode i la resta són parides! 1000V i 10A!
1N4007 diode x2 -> Aquests dos ja són més normalets, però no eren els que hi anaven, després us ho explico.
3MM LED Blue x1 -> El clàssic led per saber que tot funciona. A tensions altres és super-brillant.
4700UF/50V x1 -> Un bon tros de condensador per rectificar, si senyor.
470UF/50V x1 -> Aquest ja és més normalet…
10UF/50V x1 -> … i el germà petit.
5.1K resistor 0.25W x1 -> La resistència pel led.
100 ohm resistor 2W x1 -> La resistència més grossa. Espero que la potència estigui ben calculada, o aquest serà el punt feble de la font.
3296-10K variable resistor x1 -> El potenciòmetre per regular la tensió de sortida.
7A resettable fuse x1 -> Em sembla bona idea posar un fusible en una bèstia com aquesta. Ja tinc ganes de provar-lo…
LT1083 regulator (not original and old) x1 -> El cervell de la màquina, l’integrat que ho fa tot. Un moment, què? Que no és nou ni de veritat? Ara ja sabem per on petarà tot… En tot cas, tampoc no ens podíem esperar que el kit complet valgués com només l’integrat en una web normal, no? No cal que ens fem els tontos, l’integrat és pirata. A veure si funciona, al menys.
Parlant de l’integrat, aquest kit m’ha despertat la curiositat i me n’he baixat el datasheet, sempre és una lectura interessant. Sembla que aquesta és una bona bèstia, perquè negar-ho. No el coneixia, aquest xip, però penso que alguna altra vegada li trobaré una aplicació…
Us deixo l’enllaç al datasheet clicant aquí: LT1083
ARRIBA EL KIT
Després de tres setmanes d’esperar, el paquet per fi ha arribat. He obert la capsa i això és el que m’he trobat. Com podeu veure, l’embalatge del kit no pot ser més senzill: una simple bossa mini-grip, ni tan sols és antiestàtica.

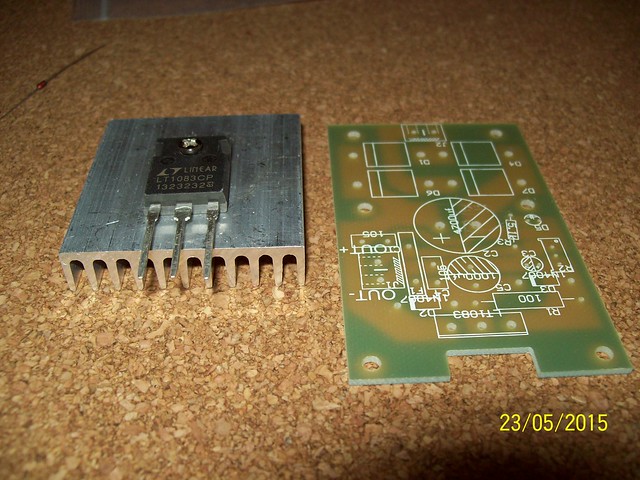
I aquest és el contingut de la bossa. És evident que no hi ha cap mena de manual, ni en “chinglish” ni tan sols en mandarí. M’hauré de refiar de la serigrafia; sort que és prou clara.

El radiador i la placa de circuit imprès per l’altra cara. És una placa molt senzilla, amb pistes només per una cara.

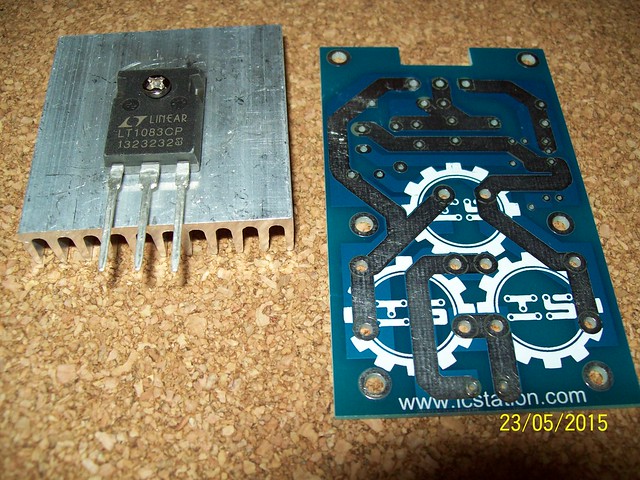
Ara un detall de les dues peces més grans. El xip ja venia collat al radiador amb un cargol, tot i que no estava pas apretat.
La placa per la cara de les pistes. Ja es pot veure que són ben gruixudes, per aguantar tanta corrent. El xip realment sembla de veritat, és una bona imitació.
HORA DE SOLDAR
Per fi arribar l’hora d’escalfar el soldador i agafar l’estany. Ja ho trobava a faltar…
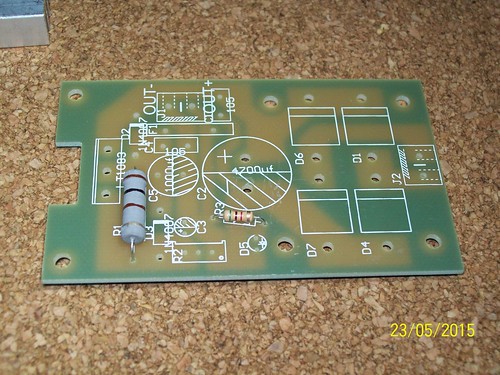
Es comença sempre pels components més baixets, i llavors es va fent els més grossos. El primer pas és, doncs, soldar les resistències.

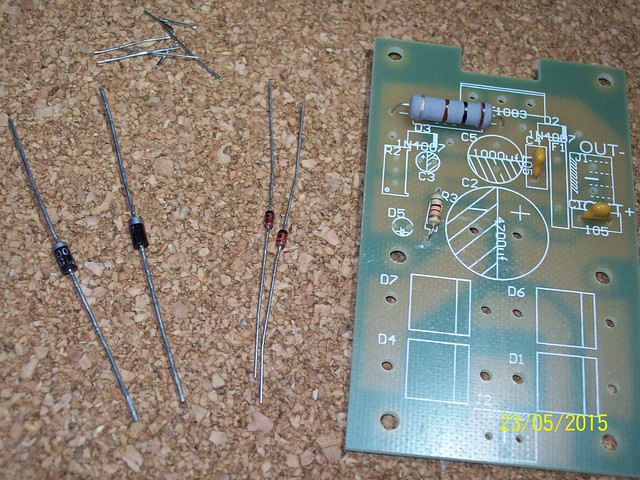
Tot seguit és el moment dels condensadors ceràmics, i després els diodes petits, però aquí em trobo el primer escull. Resulta que la serigrafia de la placa (i el llistat de components de la pàgina web) posa que són dos diodes 1N4007, però en realitat al kit hi havia dos diodes 1N4148. Aquests són més petits, són diodes de senyal i no de rectificació. Segurament no hi hauria cap problema posant aquests, pel que veig al datasheet només serveixen per protegir l’integrat de corrents inverses. Però ja que en tinc aquí, de 1N4007, em decanto per soldar-hi els que toca. Mireu la diferència que hi ha: a l’esquerra els 4007 -més grossos i de color negre- i a la dreta els 4148 -amb el seu color transparent característic-.
Superat el dubte, segueixo soldant els components un per un. Les indicacions de la placa són clares, i els forats suficientment grans. Un kit ben fàcil de muntar. A la foto ja està quasi tot soldat. “M’encanta la olor de l’estany al matí!”

El condensador gros s’ha de muntar al final. Aquí ja només falta el xip. En aquest punt m’he aturat, ja que si soldo el xip el radiador em taparà els forats de la placa, i ja no la podré muntar enlloc. Fixeu-vos-hi.

O sigui que munto quatre separadors hexagonals de M3, amb les seves femelles i volanderes perquè quedin ben fixes.


El següent pas és soldar l’integrat. Només cal tenir en compte la posició i la mida del radiador per saber a quina alçada ho hem de fer. Una vegada soldat, ja li podem posar el radiador de manera definitiva. Abans de fer-ho, però, cal posar pasta tèrmica entre les dues peces. Això millorarà enormement la capacitat de dissipació de l’integrat i, per tant, la canya que li podrem donar sense que mori carbonitzat.
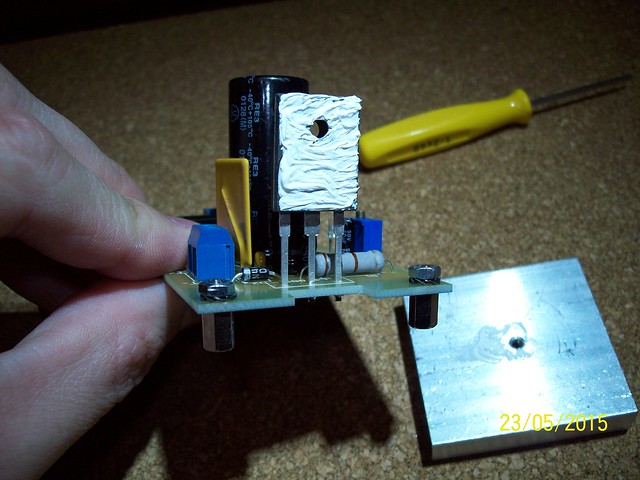
I aquí el teniu, bo i acabat!

Com podeu veure, el radiador no toca els separadors que he muntat a la placa. Això té un sentit, ja que normalment aquesta mena d’integrats tenen la dissipació en una part activa, i el kit no portava cap aïllament per posar entre l’integrat i el radiador. Això vol dir que ara mateix el radiador està connectat elèctricament a una de les potes (caldria mirar quina al datasheet).
També he canviat el cargol que portava el kit de sèrie per un d’una mica més llarg, així he pogut posar una volandera i collar el radiador ben fort. Com a detall he de dir que el condensador més gran queda just davant el cargol, i costa una mica de collar des d’un costat. Hauria d’haver deixat el condensador gros pel final, o muntar el radiador al regulador abans de soldar-lo; però tampoc no hauria estat massa còmode soldar el xip amb el radiador posat, és massa voluminós.
Un últim detall que vull comentar. Hi ha una altra cosa molt recomanable per fer, i és cobrir les pistes de la placa amb estany. Això permetrà que passi més corrent per les pistes sense que s’escalfin o es cremin. Aquest és un vell truc de l’ofici, que personalment recomano, sobretot amb les plaques de les que desconeixem el gruix de la capa de coure. Jo diria que el fabricant de la placa ja és el que vol, sinò hauria cobert les pistes amb “solder mask” perquè no es fessin malbé amb el temps. Un bon gruix d’estany farà la mateixa funció, alhora de permetre que els electrons corrin lliures en multitudinària processó…

LES PROVES
De moment les proves que he fet són molt bàsiques. Només he comprovat el funcionament sense càrrega, posant a l’entrada del kit 25,5V de corrent altern provinents d’un transformador endollat als 230V de la xarxa. Amb el tester (multímetre!) a la sortida, he pogut veure des de 1,25V fins a 33,9V en contínua.
El led (que és blau i molt brillant) s’encén correctament, tot i que per sota dels 3V de sortida s’apaga, evidentment.
Per fer pujar i baixar la tensió de sortida només cal fer girar el potenciòmetre del kit. Des del punt més baix fins al més alt he comptat 15 voltes completes. Aquest fet té l’avantatge que es pot graduar amb molta precisió la sortida, però l’inconvenient que es tarda molta estona dels 5V als 24V per exemple, cal fer moltes voltes. A més, el potenciòmetre és tan petit que el cargol sobre el que cal actuar és diminut, fa falta un tornavís de rellotger.
És evident que em falten una bona colla de proves per fer. La prova de funcionament sense cap càrrega no té gràcia, el kit haurà de demostrar el que val tot donant corrent a sac. Llavors podré mesurar l’arrissat de la tensió a la sortida, la capacitat tèrmica del radiador, i moltes coses més. Tinc ganes de provar aquest fusible, també, és molt temptador demanar-li uns quants watts al xip. També caldrà veure què tal funciona el mecanisme de protecció per sobre-temperatura del regulador. Dubto que aquest radiador pugui dissipar gaire potència, potser n’hi posaré un de més gran… Ara mateix tot això no ho puc fer, ja que el transformador que tinc és molt petit: abans de cremar el regulador cremaré el transformador, i no es tracta d’això.
Què sé jo, ja em rumiaré tot el que en puc treure, d’aquest kit. La idea bàsica és fer-ne una font d’alimentació de taller, una que tingui una bona capacitat. Però per això farà falta un bon transformador, una caixa maca, potser un voltímetre i un amperímetre… I per suposat un (o dos) potenciòmetres de panell, per regular la tensió còmodament com cal.
Ja us en tindré informats, de moment el pla d’avui només era passar una estoneta soldant tranquil·lament tot escoltant música!
Fins la propera!






